
University of Washington AI for Robotics Volume 2
https://www.linkedin.com/posts/anroge...
I briefly discuss a few pertinent topics such as:
1. Euler angles vs. Quaternion transformations via the TF package in ROS (visualized with the Microsoft Azure Kinect).
2. Adaptive Monte Carlo Localization (package
/node python code examples).
3. A method to ensure your derivative 10 element np_array buffer error delta % for the PID integration doesn’t go in circles!
MUSHr Website:
https://mushr.io/
Github Link:
https://github.com/prl-mushr/mushr#co...
QuickStart:
https://mushr.io/tutorials/quickstart/
WIKI:
http://wiki.ros.org/
AI Robotics University of Washington Volume 1:
https://youtu.be/7nXoaTfkWRk
Final Race:
https://youtu.be/joCpPEPd68o
Particle Filter:
https://youtu.be/tU8dOPSQl-o
Path Planning-Navigation:
https://youtu.be/MJgNMGYq84M
Clone Follower:
https://youtu.be/opmtRCcBnDc
Figure 8 .Bag File:
https://youtu.be/TAUjwiKW8w0
Computer Vision-OpenCV via Intel RealSense D435i:
https://youtu.be/C5AU_2wWEuc
Navigation via .Bag File:
https://youtu.be/CafjN1CqEks
-
 8:38
8:38
AI Robotics & Embedded Platforms (rpi4B, Jetson Nano, NX, AGX)
4 years ago $0.02 earnedUniversity of Washington AI for Robotics Volume 1
162 -
 1:49
1:49
AI Robotics & Embedded Platforms (rpi4B, Jetson Nano, NX, AGX)
4 years agoAI Robotics University of Washington MuSHR Race 2019
65 -
 25:17
25:17
Spatial Computing R&D
4 years agoUniversity of Washington Privacy Engineering MSEE Final Project 2020
91 -
 4:18
4:18
BPR
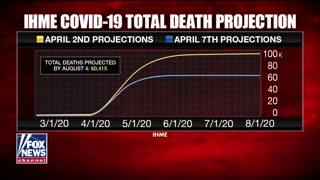
4 years agoUniversity of Washington coronavirus professor on models
2.74K -
 0:12
0:12
Chamy7276
4 years ago $1.85 earnedWashington check
1.24K -
 13:18
13:18
Drone videos
4 years ago $0.17 earnedWashington State Park
6971 -
 3:13
3:13
LandOnWater
4 years ago $0.02 earnedMt. Washington Flight
901 -
 8:48
8:48
My Videos
4 years ago $0.18 earnedExploring Eastern Washington
211 -
 6:49
6:49
NewHampshire603
4 years agoMount Washington Auto Road
70 -
 4:04
4:04
NewHampshire603
4 years ago $0.01 earnedMount Washington State Park
164